车牌自动识别技术作为智能交通系统与车辆管理的关键组成部分,近年来随着计算机视觉与人工智能的飞速发展,已广泛应用于高速公路收费、停车场管理、违章抓拍、智慧城市安防等诸多领域。本文旨在探讨其核心原理、技术开发的挑战以及未来的发展趋势。
一、 技术原理概述
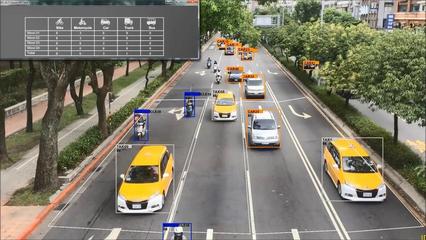
车牌自动识别系统通常由三个核心模块构成:车牌定位、字符分割和字符识别。
- 车牌定位: 这是识别的第一步,旨在从复杂的车辆图像中准确找到车牌区域。常用技术包括基于颜色、纹理、边缘特征的图像处理算法,以及近年来基于深度学习的目标检测模型(如YOLO、SSD等),后者在复杂光照、污损和倾斜情况下表现出更强的鲁棒性。
- 字符分割: 在定位到车牌区域后,需要将车牌图像中的单个字符(汉字、字母、数字)分割开来。传统方法依赖于垂直投影、连通域分析等,难点在于处理字符粘连、光照不均和边框干扰。深度学习中的语义分割网络也为此提供了新的解决方案。
- 字符识别: 对分割后的单个字符进行识别。早期多采用模板匹配或支持向量机等机器学习方法。如今,基于卷积神经网络(CNN)的分类模型已成为主流,其能够自动学习字符的深层特征,识别准确率极高。更先进的端到端识别模型(如CRNN)则试图跳过显式的字符分割步骤,直接从车牌区域图像序列中识别出字符序列。
二、 技术开发中的关键挑战
尽管技术已相当成熟,但在实际部署中仍面临诸多挑战:
- 环境复杂性: 强光、逆光、阴雨雾霾等恶劣天气会严重影响图像质量;车牌本身的污损、磨损、反光也会增加识别难度。
- 车牌多样性: 不同国家、地区的车牌格式、颜色、尺寸、字体差异巨大;特种车辆(如军警、外交车辆)车牌样式特殊;新能源车牌等新型车牌的不断推出,都要求系统具备良好的泛化能力。
- 动态场景适应: 高速运动导致的图像模糊、拍摄角度倾斜(俯仰、偏转)等,都对定位和识别算法提出了更高要求。
- 实时性与成本平衡: 许多应用场景(如道闸系统)要求极高的实时响应速度,同时还需考虑硬件(摄像头、计算单元)的成本控制,这需要在算法精度与计算效率之间取得最佳平衡。
三、 未来发展趋势
车牌自动识别技术将在以下方向持续深化:
- 算法深度化与轻量化并行: 更强大、更精准的深度学习模型将继续提升识别上限;模型压缩、剪枝、量化等技术将使高性能算法能够部署到边缘计算设备(如智能摄像头)上,实现更低延迟、更低功耗的实时识别。
- 多模态融合感知: 结合红外成像、雷达、激光雷达等多传感器信息,弥补纯视觉在极端天气和光照条件下的不足,实现全天候、全地形的可靠识别。
- 与车路协同深度融合: 车牌识别将不仅仅是“身份读取”,更将作为车辆唯一标识,与高精地图、车联网通信(V2X)相结合,服务于更广泛的智慧交通调度、路径诱导、自动驾驶协同等宏观场景。
- 隐私与安全增强: 随着数据安全和隐私保护法规日益严格,未来的技术开发需更加注重数据脱敏、加密传输和合规使用,在实现功能的同时保障公民个人信息安全。
车牌自动识别技术从实验室走向大规模应用,是计算机视觉技术成功落地的典范之一。其持续发展不仅依赖于算法本身的进步,更有赖于对实际应用场景中复杂需求的深刻理解与工程化解决能力。随着人工智能与物联网技术的交汇,这项“老技术”必将焕发出新的活力,成为构建智慧、高效、安全未来交通体系的基石。